靈活精準!深圳先進院提出基于寬度學習的微型機器人智能軌跡追蹤方法
近日,中國科學院深圳先進技術研究院集成所智能仿生研究中心的徐升和徐天添研究團隊合作,首次將寬度學習算法成功應用于微型機器人軌跡追蹤控制中,將數據驅動的思想用于微型機器人控制器設計,由示教訓練替換復雜調參,并推導訓練算法參數約束以保障穩定性能,極大提升了微型機器人軌跡追蹤的準確性及控制器的靈活調整能力。
研究成果以A Learning-Based Stable Servo Control Strategy Using Broad Learning System Applied for Microrobotic Control為題,發表在人工智能領域權威期刊IEEE Transactions on Cybernetics (JCR一區,影響因子:11.448)。徐升副研究員為第一作者,徐天添研究員為通訊作者,深圳先進院為第一單位。
可以在低雷諾數的流體環境作業的螺旋形微型機器人,由于尺度很小,可以輕松在復雜狹小的空間作業,在靶向治療上有非常大的應用潛力。然而,受系統強非線性、給定軌跡多樣性的影響,如何實現微型機器人的精準軌跡追蹤的同時又能避免頻繁的控制器調整,是十分具有挑戰的工作。基于人工智能的學習算法對于解決以上問題有著突出優勢。寬度學習算法,自2017年被提出后,主要應用在圖像處理、特征辨識、數據分析等領域,其模型相比于傳統的深度學習模型,在保證一定精度的同時,具有快速、簡潔、支持增量式在線模型更新的突出優點。因此,寬度學習非常適合解決微型機器人復雜軌跡追蹤中目標軌跡的多變性,而且其增量式更新方法有望避免控制器頻繁調整。
研究團隊建立了以寬度神經網絡為主體的追蹤控制器結構;構造了適用于螺旋形微型機器人軌跡跟蹤系統的李雅普諾夫函數,推導出能夠保障追蹤穩定性的控制器參數約束條件;將多條不同追蹤軌跡作為示教數據,開發了基于寬度學習的訓練算法,自動解算控制器參數。
通過仿真及實驗,研究團隊發現,基于寬度學習的訓練算法具有訓練快速的特點,訓練時間只需6秒左右,較深度學習方法具有一定優勢;訓練后的控制器可以追蹤不同形狀、速度的軌跡,追蹤精度優于課題組前期采用的非線性滑模控制以及同樣訓練快速的超限學習方法;另外,寬度學習訓練算法具有增量式擴展功能,當加入新的訓練數據后,可以實現控制器的快速調整,改進追蹤效果。本研究成果不僅為微型機器人軌跡追蹤控制提供了新理論,而且為機器學習與微型機器人技術的有機融合提供了新思路,有望推動寬度學習在微型機器人的應用。
該系列研究工作得到了國家重點研發計劃、國家自然基金、廣東省、中科院青促會、深圳市等科技項目資助。
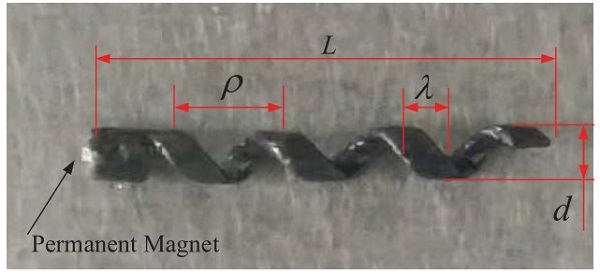
實驗所用磁驅動螺旋形微型機器人
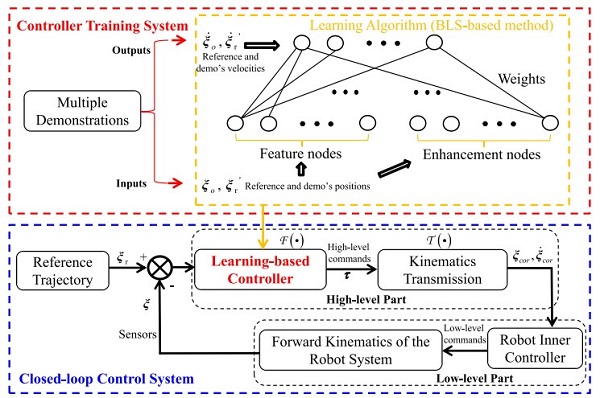
系統整體框圖:包括寬度學習訓練系統和微型機器人控制系統
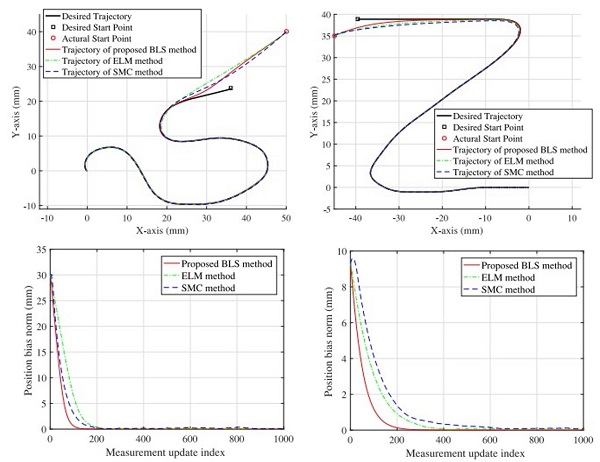
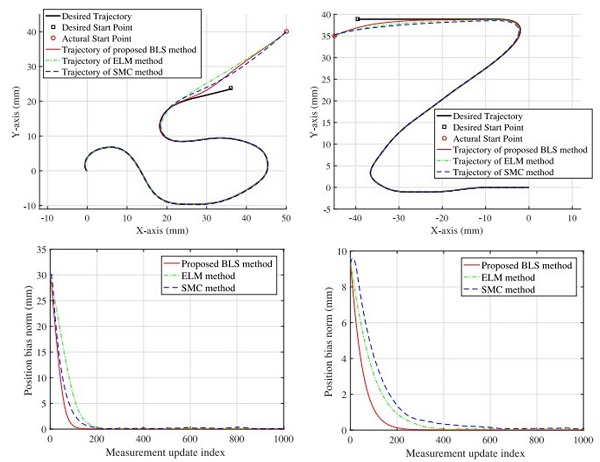
圖X 追蹤黑色“S”“Z”型給定軌跡,紅色線為所提方法,藍色、綠色線為其他方法(上兩圖);軌跡追蹤的實時位置誤差(下兩圖)。