深圳先進院等研發(fā)出能夠快速制造微型機器人的膠質(zhì)磁性噴霧
近日,中國科學(xué)院深圳先進技術(shù)研究院集成所智能仿生中心吳新宇研究團隊與香港城市大學(xué)申亞京團隊合作,提出一種通用、可擴展、能應(yīng)對不同場景的微型機器人全新制造方式——利用膠質(zhì)磁性噴霧使無生命目標(biāo)物體成為可控微型外骨骼。
研究成果以An agglutinate magnetic spray transforms inanimate objects into millirobots for biomedical applications為題發(fā)表在機器人領(lǐng)域頂級期刊Science Robotics上。深圳先進院尚萬峰副研究員和香港城市大學(xué)楊雄為共同第一作者,吳新宇研究員和香港城市大學(xué)申亞京為共同通訊作者,其他作者包括陸豪健博士、劉雁婷博士、楊柳以及譚蓉。
微型機器人由于其良好的可控性和適應(yīng)性而在生物醫(yī)學(xué)中有著廣泛的應(yīng)用前景。但是考慮到目標(biāo)對象多變的尺寸和形狀,以及工作環(huán)境的非結(jié)構(gòu)化和不可預(yù)測,單一機器人常難以應(yīng)對不同的任務(wù)或環(huán)境。一種可擴展、通用、能應(yīng)對不同場景的微型機器人制造方法仍存在很大挑戰(zhàn)。
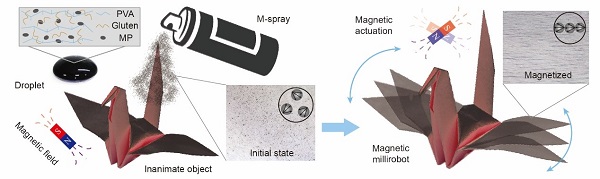
在自然界,很多生物本身并沒有很好的運動能力,但是它們卻可以通過寄生或吸附的方法利用其他生物或物體到達自身難以企及的地方, 比如,有一種彩蚴吸蟲能夠感染蝸牛并控制蝸牛違背原來的生活習(xí)性爬到高處。受此演化啟發(fā),團隊研發(fā)了一種由聚乙烯醇(PVA)、谷蛋白(Gluten)和鐵粉(Iron particles)混合而成的膠質(zhì)磁性噴霧,通過對目標(biāo)物體表面噴涂的方式,給它穿上一層磁性外衣(只有約100-200um厚度),可變魔術(shù)般將無生命物體變成可以磁驅(qū)的微型機器人智能體。該種磁性噴霧在固化前表現(xiàn)出良好的自粘性,不僅能夠粘附親水和疏水的表面,而且在磁性噴霧固化后磁性噴霧的自粘性會隨之消失,即在對物體表面貼合的同時而對外界環(huán)境不表現(xiàn)出任何粘性。這一特征保證了外界環(huán)境不會對物體的運動造成不良影響。
這種利用物體本身結(jié)構(gòu)實現(xiàn)運動的方法具有極強的適應(yīng)性。智能仿生中心尚萬峰副研究員從理論分析和有限元模擬等個多角度入手,闡明了該類噴霧磁化方法的微型機器人通用運動學(xué)和動力學(xué)模型。理論分析顯示,只要在磁力矩和磁拉力作用下不同的微型機器人會依靠其本身獨有的結(jié)構(gòu)和形態(tài)從而產(chǎn)生相應(yīng)的變形以及步態(tài)。為進一步驗證該策略的可行性,團隊使用磁性噴霧將棉線、折紙、PDMS薄膜和塑料管等各種不同材料和形狀的常見物體轉(zhuǎn)化為磁驅(qū)機器人,并且在磁場驅(qū)動下實現(xiàn)了爬行、行走、滾動、游動等運動形式,與理論分析一致。除具備良好運動能力外,覆蓋在物體表面的磁性噴霧還具有可控離解,可重編程等特點,為其在生物醫(yī)學(xué)領(lǐng)域的應(yīng)用提供了很大潛力,如主動送藥、可控內(nèi)窺探頭等。
將無生命的物體按需轉(zhuǎn)化為可移動的微型機器人的策略為在不可預(yù)知的有限空間進行操作、運輸和交付提供了潛力。吳新宇研究員指出:“這種‘寄生’的方式,給我們仿生機器人的設(shè)計提供了一個新的思路。我們希望能夠利用該策略,拓展現(xiàn)有的結(jié)構(gòu)仿生,在將來能夠設(shè)計出具有運動能力的傳感器、微外骨骼等。”
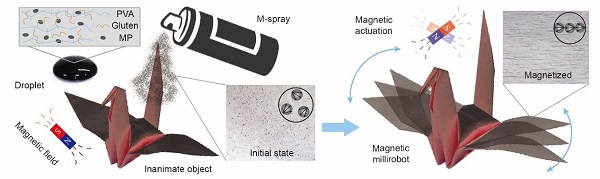
圖1. 磁性噴霧將無生命物體轉(zhuǎn)變?yōu)榇趴匚⑿蜋C器人的過程
圖2. 磁性噴霧將不同材料和形狀的目標(biāo)物體變?yōu)榇趴匚⑿蜋C器人

圖3. 覆蓋在目標(biāo)物體表面的磁性噴霧在振蕩磁場下解體